Recommanded Videos

1-1. 워커 스레드 패턴과 suspending 함수
2024. 7. 21.

ContinueDev + Hermes-3 405B (Free API) : 100% FREE Copilot based on Free API (BEATS Github Copilot)
2024. 8. 18.
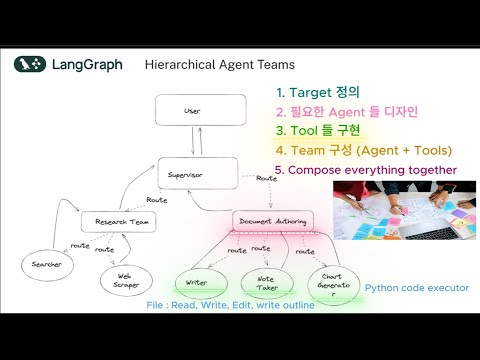
Hierarchical Agent Teams Architecture - 문서 작업팀에게 필요한 Tool들을 만듭니다. Tool 구현 마지막 시간 입니다.
2025. 1. 2.

Presenting TDD - Mockist
2023. 7. 8.

Godot GameDev Agent - GAME CHANGER Coding Assistant
2025. 2. 13.

My favorite Rust design pattern
2024. 7. 10.